Цифровые технологии оценки и планирования использования земель сельскохозяйственного назначения, базируются на системах глобального позиционирования и географических информационных системах.
Глобальные навигационные спутниковые система (ГНСС) предназначены для определения пространственных координат, составляющих вектора скорости движения, поправки показаний часов и скорости изменения поправки показаний часов потребителя ГНСС в любой точке на поверхности Земли, акватории Мирового океана, воздушного и околоземного космического пространства [91].
В настоящее время самой развернутой системой спутникового позиционирования является американская система GPS NAVSTAR, которая обеспечивает предоставление услуг в глобальном масштабе. В составе орбитальной группировки GPS в штатном режиме используется 31 навигационный спутник на орбитах высотой порядка 20 тыс. км. Период обращения спутника по орбите составляет 12 ч. Каждый спутник передает радиосигнал, содержащий данные о местоположении, времени сигнала, основных параметрах спутника и наземных станций слежения, объединенных в общую сеть. Обработка сигналов в GPS-приемнике обеспечивает точность Р-кода более 10 м и С/А-кода - около 20 м [72, 92].
Развитие системы GPS предусматривает повышение точности гражданского навигационного сигнала, создание новых навигационных спутников с повышенными тактико-техническими характеристиками, реализацию пространственного селективного доступа и др. [65].
Российская орбитальная группировка ГЛОНАСС состоит из 25 космических аппаратов, 23 из которых выполняют работу в штатном режиме, один находится на этапе летных испытаний, еще один - на исследовании главного конструктора [92]. Система ГЛОНАСС ставит перед собой задачу глобальной оперативной навигации наземных и низкоорбитальных космических объектов. Другими словами, такой объект в любом месте в любой момент времени может за несколько секунд определить параметры своего движения.
Космические аппараты, используемые в системе ГЛОННАС, выведены на круговые геоцентрические орбиты высотой 19100 км над поверхностью Земли. Их период обращения составляет 11 ч 15 мин.
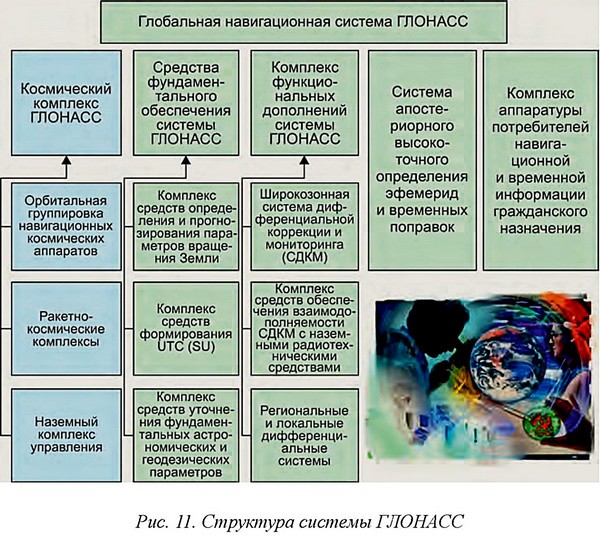
Навигационная система ГЛОНАСС обеспечивает решение навигационных и координатно-временных задач в интересах как специальных, так и гражданских потребителей (рис. 11) [72], позволяет осуществлять глобальную непрерывную навигацию путем использования сигналов стандартной и высокой точности.
В системе ГЛОНАСС используется частотное разделение сигналов (два диапазона частот), в GPS - кодовое разделение сигналов
(две частоты передачи сигналов). По аналогии с системой GPS диапазон частот сигнала стандартной точности называют диапазоном L1, высокой точности - L2 [93].
Федеральной целевой программой «Глобальная навигационная система», предусматрено развитие системы ГЛОНАСС в части повышения точности и достоверности определения координат объектов, внедрения спутниковых навигационных технологий управления движением, значительное снижение эксплуатационных расходов, отказ от использования традиционных наземных навигационных радиотехнических средств и др. Разработка глобальных навигационных систем ведется также в европейских странах (Galileo).), Китае (COMPAS), Индии (IRNSS) и Японии (QZSS) [72].
Базовым методом определения координат является вычисление расстояния от GPS-приемника до нескольких спутников, расположение которых считается известным. Постоянно отслеживая свое местоположение в течение некоторого времени, GPS-приемник может рассчитать скорость и направление движения. Для обеспечения точности вычислений полученный сигнал спутника должен корректироваться с помощью дифференциальной системы позиционирования (DGPS), которая устраняет более 90% погрешностей, связанных с влиянием атмосферы Земли на спутниковый сигнал, а также вызванных неточностью вычисления времени и высоты орбит спутников. В настоящее время существует множество широкозонных, региональных и локальных дифференциальных систем [72].
В мире существуют следующие системы дифференциальных поправок: американская WAAS, европейская EGNOS, японские MSAS и QZSS, индийская GAGAN. Эти системы используют геостационарные спутники для передачи поправок всем потребителям, находящимся в зоне их покрытия (2000-5000 км2). Диапазон рабочей зоны региональных систем составляет от 400 до 2000 км2. Локальные системы имеют максимальный радиус действия 50-200 км. Сервисы DGPS условно можно разделить на два типа: наземный и спутниковый. Они могут быть бесплатными и платными.
На территории России основными видами спутниковых бесплатных дифференциальных поправок являются системы EGNOS (только Европейская территория России, не включая Южный федеральный округ и Поволжье), обеспечивающие точность 40-50 см и StarFire 1 (фирма «John Deere»), которая работает только с фирменным оборудованием, точность - 35 см. Среди платных систем коррекции следует отметить спутниковые дифференциальные сервисы Omnistar, предусматривающие несколько видов поправок: Omnistar VBS с точностью 15-20 см, Omnistar HP/XP - точность 8-10 см, а также StarFire 2 - точность 10-18 см.
К платным наземным поправкам относятся RTCM и RTK, позволяющие добиться точности 50 и 2-5 см соответственно. Для RTK- режима требуются два специализированных GPS-приемника и два радиомодема (рис. 12) [71]. Один приемник, являясь базовой станцией, передает сообщение поправки подвижному приемнику (роверу). Оба приемника собирают дополнительные данные от GPS- спутников по каналу L2, что ведет к повышению точности.
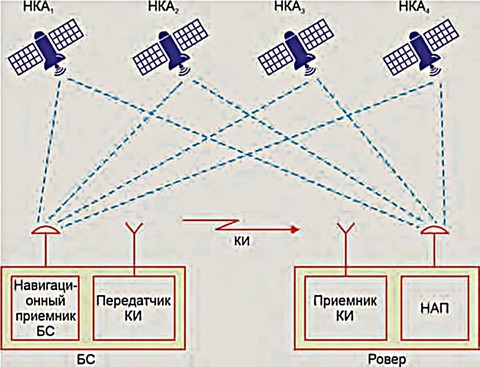
Рис. 12. Организация дифференциального режима ГНСС (НКА - навигационный космический аппарат, БС - базовая станция, НАП-навигационная аппаратура потребителей, КИ - корректирующая информация)
Такие поправки передаются по радиоканалу в радиусе 11 км от базовой станции и ограничиваются мощностью передатчика и рельефом местности. Ровер, используя поправки от БС, корректирует свои параметры и получает координаты с более высокой точностью (до 2,5 см). Для вычисления поправок существуют метод коррекции координат и метод коррекции по навигационному параметру [72].
В большинстве систем дифференциальной коррекции используется метод коррекции по навигационному параметру. Степень повышения точности определения местоположения напрямую зависит от дистанции между ровером и базовой станцией (БС). Увеличение расстояния уменьшает корреляцию систематических погрешностей БС и ровера, что снижает эффект корректировки данных. Поправки, которые формируются специальным программным обеспечением, встроенным в GPS-приёмник, называются внутренними, они обеспечивают точность движения по параллельным рядам от 20 до 30 см [71].
Источник: Буклагин Д.С., Мишуров Н.П., Балабанов В.И., Зейлигер А.М., Петухов Д.А. Цифровые технологии оценки, планирования и прогнозирования использования земель сельскохозяйственного назначения: аналит. обзор – М.: ФГБНУ «Росинформагротех», 2020. – 92 с., страница 52-56